销售一部

0755-86656083
24小时热线
0755-86656390
0755-86656083
24小时热线
0755-86656390



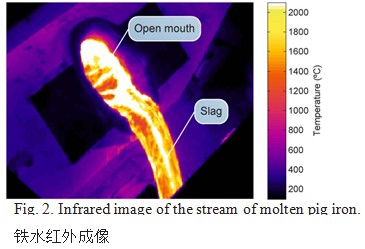
图2展示了铁水流从鱼雷车倒入钢包时的红外图像。图像出自西班牙Avilé的ArcelorMit- tal炼钢厂。 一般情况下,根据温度的不同在图像中铁水能被明显区分出来,不过,为了准确的测量温度,十分有必要确认哪些像素真正属于铁水。本测量方法是基于检测铁水流位置和消除因覆盖在铁水上的熔渣所形成的温度区域。之所以确定铁水流位置是为了避免可视范围内其他热源的干扰。比如附近的鱼雷车。清除掉铁水范围内以高温呈现的溶渣影像是为了避免在最终温度计算中出现错误。
用于测量温度的红外摄像机是Flir
ThermoVision A325,其像素是320 ×240,最大采集频率60Hz,即每16.67毫秒可获得一个新图像,温度范围可配置在几个可用范围内。实验中,选中300 ◦ C, 2000 ◦ C范围,制造商报告的测量精度为±2 ◦ C,灵敏度低于50 mK。摄像机通过专用的千兆以太网电缆链接计算机。红外长波段摄像相可运转8–12 μm。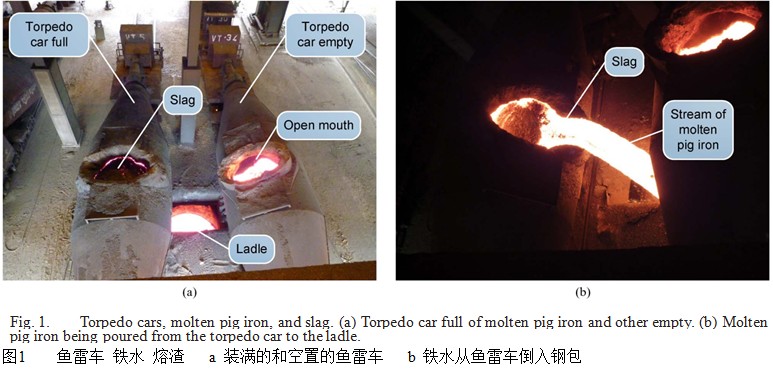
在工厂中安装此系统并不容易,因为周围环境会很脏而且空气中充满灰尘。这种恶劣的环境严重影响昂贵的红外摄像机,以及锗造敏感镜头。因此,必须保护长久性安装的摄像机,我们的建议是使用好的摄像机外壳,然而,当使用这个保障性的外壳时,红外透射率会受到影响,为了解决这一问题,必须对在外壳中的摄像机进行发射率校正。因此,发射率补偿将会降低温度计算期间接收到的辐射量。我们还建议经常清洁玻璃表面,因为玻璃表面上可能会覆盖上灰尘或其他微粒,而它们会减少摄像机测量的辐射和导致测量的误差。
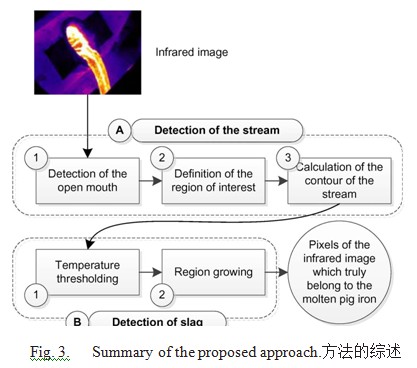
该方法在接下来的章节中分成几个步骤介绍。图3 显示了方法的总述
A.
铁水流检测
该测量方法是基于图像的几何特征的提取来检测红外图像中的铁水流。程序开始于先检测鱼雷车开口的位置,然后基于这一点,计算铁水流的整个轮廓。
1
开口的检测
当铁水倒入铜包时,铁水的起点是鱼雷车开口的位置,因此,开口部位一直在红外成像范围内。开口位置的检测可以提供图像中铁水流位置的精准信息。
采用边缘检测程序检测开口位置的目的是检测鱼雷口的轮廓,为了减少所需的处理时间,以下的优化已经应用到边缘检测。
1)由于开口部位始终位于图像上方,所以只有图像的1/3会被处理
2)只有像素在该温度值高于最低阙值时被予以考虑,如,众所周知的高于此温度的铁水.
3)边缘计算将只考虑梯形水平分量
4)图像区域中要考虑的每一行,只有第一个正面的和最后一个负面的边缘被视为有效。这确保了检测到的是开口边缘的轮廓而不是开口部位里温度变化的材料。
T
图
2
2)ROI定义:ROI是常用术语,指对图像的一部分很感兴趣。这种情况下,ROI是指对铁水流在图像上的那部分,一旦ROI确定,就没有必要处理整个铁水流图像来测温。
铁水流的位置取决于鱼雷车沿纵轴旋转的角度,识别图像中鱼雷车开口的椭圆坐标的知识极大的简化了图像中铁水流的检测。设置两条线作为ROI的垂直与水平方向的限制,铁水流将始终位于鱼雷车开口下方,即,位于椭圆最底点相切的水平线以下,沿椭圆主轴的大体方向也可以找到铁水流的位置,因此,可以设定与椭圆短轴最低点相交的垂直线为界线。ROI的位置如图
图4d 显示的是从原图中提取的ROI。提取的比原图小75%的ROI将用于下面的所有步骤,这种方法不仅避免了其他热源的干扰,也大幅度了降低了应用于下一个图像处理的计算需求。
3)铁水流轮廓的计算:第一步,计算铁水流外形是一个应用ROI的边缘检测应用程序。ROI只有每一行的第一个最正面和最后一个负面的边缘梯度的水平分量将予以考虑。在图4e可看到有两组结果,:每组是一边(左右)。
铁水流没有完整的边界,因此,噪声出现在检测边缘,这类型的问题在图4e左上方可以看出来,同时,该区域的其他热源,如现场地面上的铁水滴或其他发热的物体都可能产生虚假的边缘,为克服这一问题,将会运用到边缘连接程序。
边缘连接法首先使用单一的二次函数来确定所有左边界的边缘。每当近似函数和边缘间的最大误差εmax大于预设的阙值ε时,该时段在εmax发生的位置分成两部分,每一部分会再都由二次函数f1
(x)和
f2 (x)重新确定。此分割过程递归运行,直到最大误差εmax低于阙值ε时停止。
图5显示边缘连接程序是如何运用在正弦函数上的。第一步,设一条符合正弦函数的直线,然后这条线会在近似和正弦函数间最大的区别出现时被分解为两个子分段(正弦波的最低值),在接下来的步骤中可以看出来每段都出现两个新函数。接下来直到正弦函数正确安装,短段才停止分裂。这种情况下,七段足够了,就像看到的,每个组段都能精准描述正弦函数的轮廓。
某些分段因一些噪声可以创建出近似伪边缘,这些分段,因为没有被检测到一个超过预定阙值的,所以会被清除并形成空白轮廓。必要时,连接程序的最后一步填补了空白,只要相邻的空白点是兼容的,此程序就可以使邻近两段的边缘增长。同样的过程也会应用到右边界的边缘,最后,左右两边的边界端点连接。边缘连接程序是为应用在重型噪声条件下的低计算需求而设计的。
图
从图
这个方法是利用在红外图像中出现的明显温差把铁水从熔渣中区分开。此方法是随着区域增长的一个温度阙值法。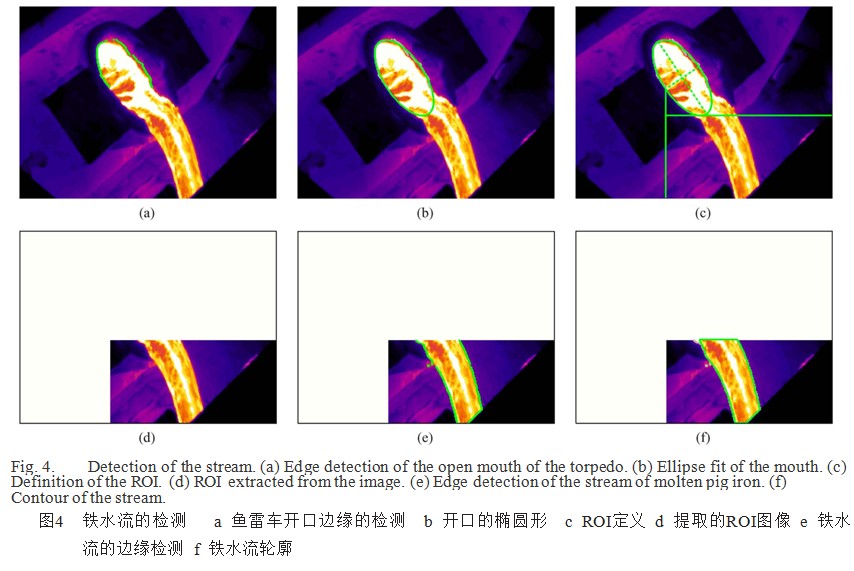
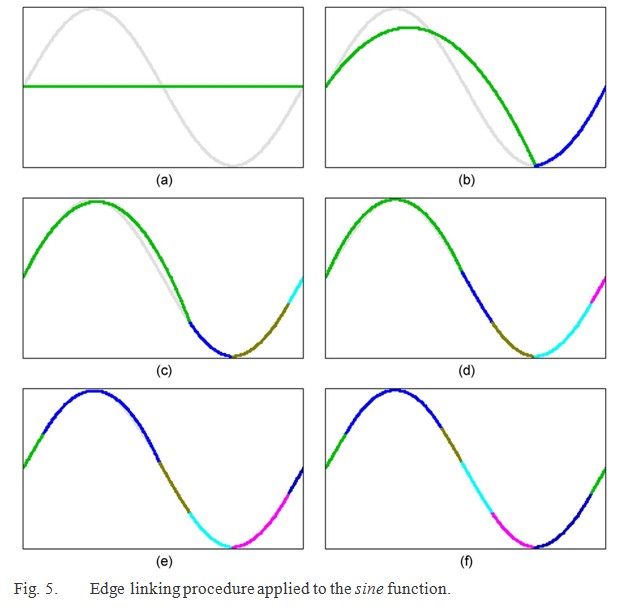
图5 适用于正弦函数的边缘连接程序
1)温度阈值:阈值是一个简单但有效的图像分割方法,使用这种方法分割铁水和熔渣的图像部分,因为铁水和熔渣间的明显温度差异,所以使用静态阙值Ths。所有高于这个阙值的像素点被视为熔渣,所以,在铁水流中不能应用它来测量铁水的温度。校准中Ths值将会稍后计算。
阙值使用(2)计算,I 代表像素值行i 列j,Ths是阙值。像素为零时不考虑下一步
T
阙值Ths必须高于最大可能的铁水温度,在几乎相同的温度下,相对于铁水,熔渣使用相同测量配置时会出现超过这个阙值的温度。因此,选择的阈值可以区分渣和铁水。为Ths使用1800◦C
的温度阈值如图6(b)所示,矿渣的像素已被移除。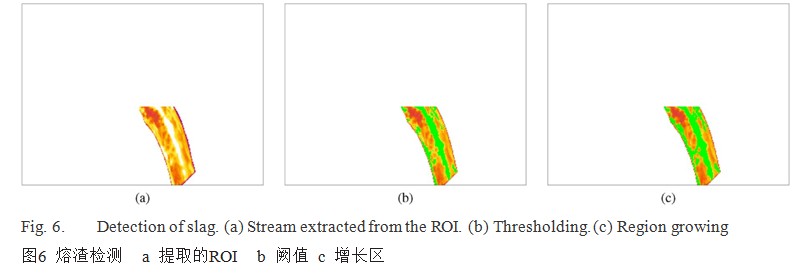
2)增长区:关闭已检测到的受熔渣影响的像素的ROI区域,因为它们的反射会改变材料的辐射特性。于是,对于这些“像素”,测量过程无法正确应用,即计算出来的温度不正确。为了探测这些像素,将使用一种“区域增长”过程。过程如下:
1)在感兴趣区内的像素即某个熔渣区域相邻的像素,如果其温度与该区域的平均温度水平近似,这些像素将会合并到该区域中。
2))重复第一步,区域不断增长,直到无法满足合并的标准
此过程将删除归类在铁水像素组的熔渣影响的像素。如图
此过程的结果是,拥有一个完全属于倒出铁水流时红外图像像素的分类,基于此分类,可通过分析每一个像素的温度水平来进行温度测量,同时,每一帧可有多个测温点,有多种选项可以用来计算单一稳定的温度测量值,比如使用所有可用像素的温度水平的平均值,其他的选项,例如温度分布的计算,是否能使用,取决于安装有温度测量系统的设备要求
C 执行时间
本文的方法可快速又稳定可靠的提供检测结果,很多不同类型的应用,如工业检测系统,需要快速的图像处理算法,以便及时发现问题和尽可能快的应用纠正行为,该方法的设计已考虑到这点。
为了测试该方法的速度,需要足够的时间从多个红外图像中测量铁水的温度,实验采用运行于2.67 GHz的特尔酷睿i5 750(RAM 4 GB)。该算法使用c++编写。
图7 显示了测量的执行时间为10000张图像,像素是320 ×
240 的直方图。平均时间为13.70毫秒,在约95%的水平,执行时间间隔是2.23ms 和14.86ms.
计算成本低是本方法的最大优势,例如,它可以实时用于高帧频率,在低帧频时,对其他种类的任务留有足够的时间。如特征提取或网络通讯。此外,它使低中端嵌入式计算成为可能。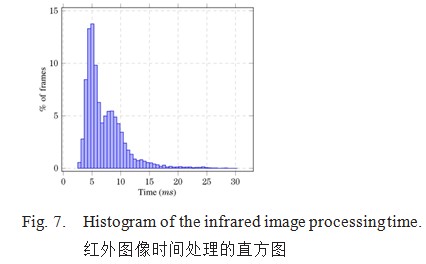
D 实时测量系统
如图7所示,60hz的摄像头不能处理所有低于16.67(A310,9hz)的帧。然而,一个基于分离采集和处理任务的低藕合架构的实时系统可以解决这一问题,采用这种方式,采集和处理任务可以并行运行,通过一个灵活的行列进行连接。系统可独立又并行的运行两个任务:“采集任务”在行列中存储帧,“处理任务”在行列中检索帧并对其进行处理,如果处理任务在下一个帧来前还没有完成这个帧的处理,行列会随着画面存储并等待处理。之后, 当处理花费的时间变少,行列就会缩小,因为这种情况下处理任务的速度要快于采集任务。在一个稳定的状态下,一个系统设计遵循建议的体系结构,在考虑到执行时间所需要的方法和指定的期限时,是能够满足实时约束的。
实验表明,低耦合架构分离任务是用于采集与处理的,此方法可以实时执行60HZ的高速红外摄像机。此外,实现处理任务需按次序,也就是说,它只使用一个核心的处理器,如果必要,这个任务的并行实施将进一步减少成本低的多处理器的执行时间和在高帧速率测量温度的可能。 杰福仪器仪表有限公司成立于2003年,自2003年代理国际知名大厂 FLIR红外线热像测温系统至今。杰福八年来专注于红外热像检测技术、10多名行业专家,一直致力于红外线热像系统的销售及技术服务,是目前中国大陆首家专业从事红外线热像系统的代理商,也是亚洲地区第一家取得美国非破坏性检测协会(ASNT)认可之高级红外线热像检测师(T/IR Level III)证照的企业,专业提供红外线热像检测师培训课程及资格认证服务,并为企业提供配套热像仪方案。杰福公司是国内率先倡导将「红外线热像检测技术」广泛应用于炼铁、轧钢、化工、塑料、石化等领域,红外线热像检测技术已广为应用于设备预警领域。丰富的专业知识及实务经验,已深获业界的肯定与好评。
相关新闻
| [2014/8/14] | |
| [2014/6/5] | |
| [2014/6/5] | |
| [2014/5/23] | |
| [2014/4/14] |
